前方交会 V1.0 绿色版
- 软件介绍
- 人气下载
- 下载地址
- 网友评论
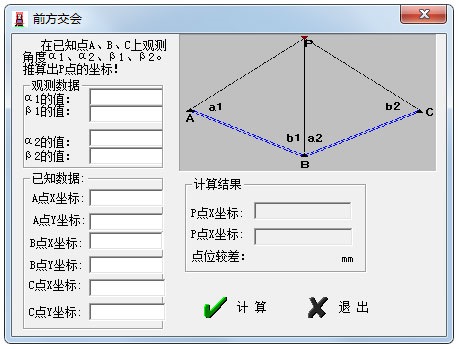
前方交会是一款利用三点得到第四点坐标的计算工具。其中需要观测数据(角度)和已知数据(坐标)来计算结果,是测绘学(一级学科)与工程测量(二级学科)所需应用的计算工具。前方交会界面简洁,操作方便,体积小巧,功能全面,而且在已知点A、B、C上观测角度α1、α2、β1、β2,推算出P点的坐标。
功能介绍
在已知A、B、C上观测角度a1、a2、b1、b2,推算出p点坐标。
观测数据:a1、a2、b1、b2
已知数据:A点X坐标、A点Y坐标、B点X坐标、B点Y坐标、C点X坐标、C点Y坐标
计算结果:P点X坐标、P点Y坐标
内容定义:
在两个已知点以上分别对待定点相互进行水平角观测,并根据已知点的坐标及观测角值计算出待定点坐标的方法。
设有A、B、P三点,A、B为已知坐标的点,P为未知点,用仪器测得∠PAB和∠PBA,根据A、B的坐标可求得P点的坐标,这种方法叫做前方交会
常见问题
1、测量中什么叫前方交会和后方交会?
这是控制测量中的基本测量方法,用经纬仪。现在一般很少用了。大概意思是这样的:前交是用经纬仪在不同地点(都是已知坐标的)照准同一目标,当然国家规范上对角度和距离都有一定的限制,用不同组坐标推算目标坐标,还要检核。后交是经纬仪架在未知点上,向已知坐标点照准,计算方法相似。
2、全站仪的前方交会法和后方交会法分别应用于什么不同情况下?
一般用于几个控制点不能通视的情况下。以前也采用这两种方法做控制,加密控制点。前方交回和后方交回用的控制点个数不一样的。
3、怎么用全站仪前方交会,需要用棱镜照准么?
首先必须要有至少2个控制点(假如分别为A,B),在A上架设仪器对中整平,瞄准B后水平角置零,然后瞄准目标点P(比如塔尖),记下水平角度∠BAP,然后将仪器搬至B上架设仪器对中整,瞄准A后水平角置零,然后瞄准目标点P(比如塔尖),记下水平角度∠ABP.(这样计算只有平面坐标,如果需要高程值话还需要量取仪器高,棱镜高,同时还要测量竖直角)。
人气下载






本类总下载排名
- 54次 1 GeoGebra CAS计算器 V6.0.732.0 官方版
- 47次 2 科瑞计算簿 V1.40 官方版
- 48次 3 GeoGebra CAS计算器 V6.0.729.0 官方版
- 62次 4 卡方检验计算器 V2.1 官方安装版
- 80次 5 Free42(科学计算器软件) V3.0.14 绿色英文版
- 64次 6 GeoGebra CAS计算器 V6.0.702.0 官方版
- 65次 7 算王安装算量软件 V2020.10.8 无锁版
- 68次 8 欧氏距离计算器 V1.0 免费版
- 62次 9 徕卡测量计算器 V1.0 免费版
- 50次 10 cie1931(色坐标计算软件) V1.6.0.2 免费绿色版
本类月下载排名
- 54次 1 GeoGebra CAS计算器 V6.0.732.0 官方版
- 47次 2 科瑞计算簿 V1.40 官方版
- 48次 3 GeoGebra CAS计算器 V6.0.729.0 官方版
- 62次 4 卡方检验计算器 V2.1 官方安装版
- 80次 5 Free42(科学计算器软件) V3.0.14 绿色英文版
- 64次 6 GeoGebra CAS计算器 V6.0.702.0 官方版
- 65次 7 算王安装算量软件 V2020.10.8 无锁版
- 68次 8 欧氏距离计算器 V1.0 免费版
- 62次 9 徕卡测量计算器 V1.0 免费版
- 50次 10 cie1931(色坐标计算软件) V1.6.0.2 免费绿色版











