RobotStudio(abb机器人仿真软件) V6.08 免费最新版
- 软件介绍
- 人气下载
- 下载地址
- 网友评论
RobotStudio6.08是一款非常好用的机器人仿真编程软件,基于abb虚拟控制器构建,用户利用其强大的虚拟控制器在机器人生产环境之外运行仿真编程程序,使用车间相同的机器人程序和配置文件来执行相当逼真的机器人仿真设计工作。软件支持导入iges、step、vrml、vdafs、acis等等CAD格式文件。
功能介绍
【CAD导入】
RobotStudio可方便地导入各种主流CAD格式的数据,包括IGES、STEP、VRML、VDAFS、ACIS及CATIA等。机器人程序员可依据这些精确的数据编制精度更高的机器人程序,从而提高产品质量。
【AutoPath】
RobotStudio中最能节省时间的功能之一。该功能通过使用待加工零件的CAD模型,仅在数分钟之内便可自动生成跟踪加工曲线所需要的机器人位置(路径),而这项任务以往通常需要数小时甚至数天。
【程序编辑器】
程序编辑器(ProgramMaker)可生成机器人程序,使用户能够在Windows环境中离线开发或维护机器人程序,可显著缩短编程时间、改进程序结构。
【路径优化】
如果程序包含接近奇异点的机器人动作,RobotStudio可自动检测出来并发出报警,从而防止机器人在实际运行中发生这种现象。仿真监视器是一种用于 机器人运动优化的可视工具,红色线条显示可改进之处,以使机器人按照最有效方式运行。可以对TCP速度、加速度、奇异点或轴线等进行优化,缩短周期时间。
【Autoreach】
Autoreach可自动进行可到达性分析,使用十分方便,用户可通过该功能任意移动机器人或工件,直到所有位置均可到达,在数分钟之内便可完成工作单元平面布置验证和优化。
【虚拟示教台】
是实际示教台的图形显示,其核心技术是VirtualRobot。从本质上讲,所有可以在实际示教台上进行的工作都可以在虚拟示教台(QuickTeach?)上完成,因而是一种非常出色的教学和培训工具。
【事件表】
一种用于验证程序的结构与逻辑的理想工具。程序执行期间,可通过该工具直接观察工作单元的I/O状态。可将I/O连接到仿真事件,实现工位内机器人及所有设备的仿真。该功能是一种十分理想的调试工具。
【碰撞检测】
碰撞检测功能可避免设备碰撞造成的严重损失。选定检测对象后,RobotStudio可自动监测并显示程序执行时这些对象是否会发生碰撞。
【Visual Basic for Applications (VBA)】
可采用VBA改进和扩充RobotStudio功能,根据用户具体需要开发功能强大的外接插件、宏,或定制用户界面。
【PowerPac‘s】
ABB协同合作伙伴采用VBA进行了一系列基于RobotStudio的应用开发,使RobotStudio能够更好地适用于弧焊、弯板机管理、点焊、CalibWare(绝对精度)、叶片研磨以及BendWizard(弯板机管理)等应用。
【直接上传和下载】
整个机器人程序无需任何转换便可直接下载到实际机器人系统,该功能得益于ABB独有的VirtualRobot技术。
安装教程
1、在本站下载解压robotstudio6.08软件;解压安装压缩包找到“setup.exe”双击开始安装;
2、选择我接受许可协议,点击下一步;默认安装目录【c:\program files (x86)\abb industrial it\robotics it\robotstudio 6.08\】;
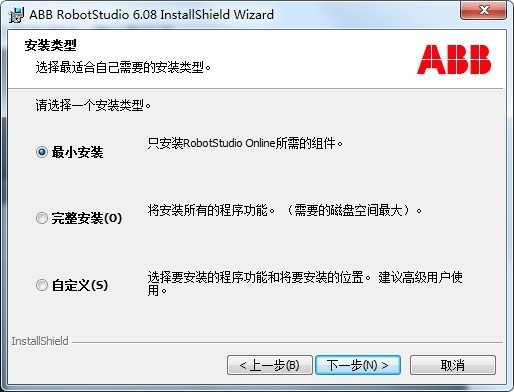
3、选择安装类型,小编在这里作为演示就只安装它所需的组件了,当然你也可以点击“完整安装”安装全部组件或者点击“自定义”安装你想要的组件,之后点击下一步;
4、稍微等待一下安装过程,首次运行,需要点时间,安装完成后,如下图所示,点击完成。
使用教程
导入机器人
在“基本”功能选项卡的“abb模型库”中,提供了几乎所有的机器人产品模型,作为仿真所用。

单击选择其中型号为irb120的机器人,确定好版本,点击确定即可。在实际应用中,要根据项目的要求选定具体的机器人型号及相关版本或者承重能力及到达距离等参数。
建立机器人系统
要为机器人创建系统,使它具有电气的特性来完成相关的仿真操作。具体操作如图所示,首先在“基本”功能选项卡下,单击“机器人系统”的“从布局。。. 。。.”
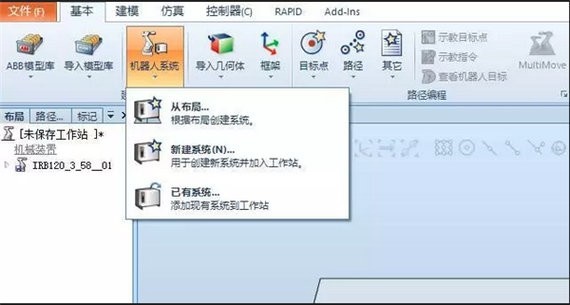
然后设定好系统的名称和保存的位置后,单击“下一个”;选择机械装置,再单击“下一个”;点击“选项”,为系统添加中文选项,勾选“644-5 chinese”点击“确定”,点击“完成”。

系统建立完成后,可以看到右下角“控制器状态”为绿色,即可操作工业机器人。
人气下载






下载地址
- PC版











